
Auch auf dem Oktober-Treffen der RG-Frankfurt stand alles unter dem Zeichen RasPi! Unter Beteiligung der RG Mainfranken sowie persönlicher Bekannten von Thomas Fries wurden ingesamt vier Projekte vorgeführt.
 Den Anfang machte - wie im März - Jürgen Thau mit seinem Projekt: "OMV - ein Eigenbau-NAS auf RasPi-Basis mit der Software Open-Media-Vault".
Den Anfang machte - wie im März - Jürgen Thau mit seinem Projekt: "OMV - ein Eigenbau-NAS auf RasPi-Basis mit der Software Open-Media-Vault".
Jürgen schlug für die Realisierung - wegen der Performance - einen RasPi-Typ 2 oder 3 vor und loggte sich live über Internet auf seinen heimischen Server ein. Er benutzt ihn für als Backup-Ablage sowie als Speicherort für Fotos und Filme.
Wie bei den meisten RasPi-Projekten kann man die Software als weitgehend vorkonfiguriertes Paket dowloaden und den RasPi per Micro-SD-Karte damit versehen. Googlen Sie einmal nach "RasPi" und "OMV", um das zu überprüfen.
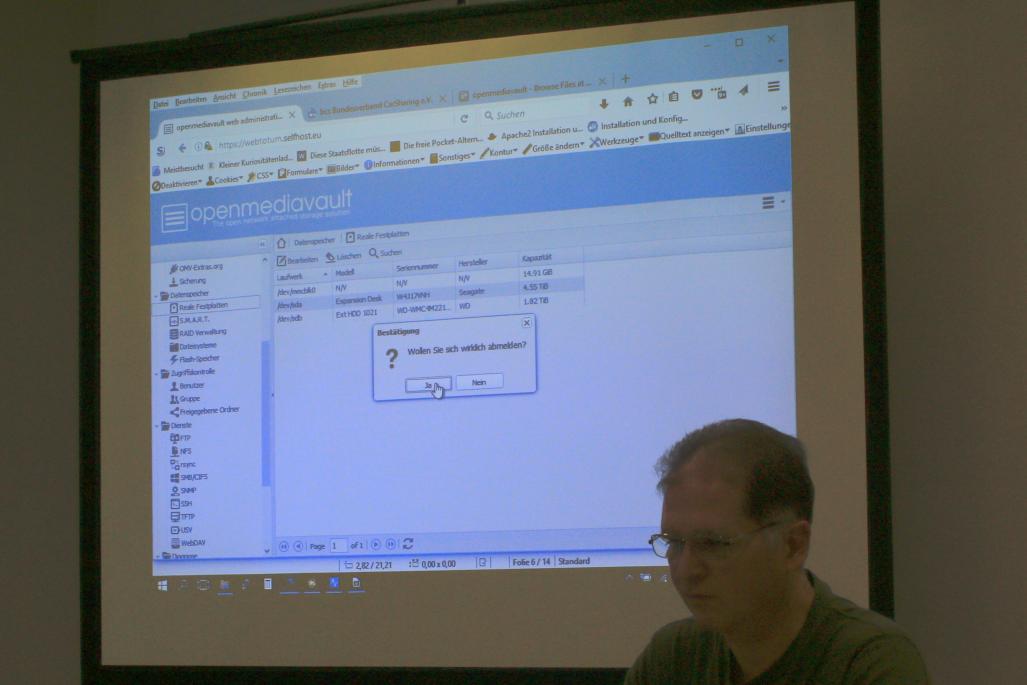 Beeindruckend sind die Konfigurationsmöglichkeiten der Software - komfortabel geschieht eine Anpassung über ein Web-Frontend.
Beeindruckend sind die Konfigurationsmöglichkeiten der Software - komfortabel geschieht eine Anpassung über ein Web-Frontend.
Hierbei sind nicht nur Protokolle und benutzte Ports zu konfigurieren, sondern auch solche Eigenschaften wie:
- Welche Benutzer arbeiten mit welchen Rechten am System?
- Wann geht welche Platte in den Ruhezustand über?
- Überwachung der angeschlossenen Festplatten per S.M.A.R.T.
- Eventuell sogar die Konfiguration der angechlosenen Platten als RAID-System.
Aufgrund der geringen Leistungsaufnahme des RasPi - etwa im 1 W-Bereich - lässt Jürgen ihn Tag und Nacht laufen. Die nicht allzu hohe Netzwerkgeschwindigkeit - max. 100 MBit/s aber über den gleichen Controller wie die USB-Schnittstellen - wirkt sich bei den genutzten Möglichkeiten nicht negativ aus und wird als ausreichend angesehen.
Die Kosten - den RasPi erhält man ab 35.- € - lassen sich mit denen eines NAS-Gehäuses nicht vergleichen.
 |
 |
Der nächste Vortrag - der, genauer gesagt, die beiden nächsten Themen behandelte - wurde von Thomas Fries (Bild rechts) und Volker Foitzik (Bild links) gemeinsam bzw. im Wechsel gehalten.
 Grundsätzlich geht es um das Wiegen von Gegenständen, die auf Förderbändern vorbei laufen. Variationen sind:
Grundsätzlich geht es um das Wiegen von Gegenständen, die auf Förderbändern vorbei laufen. Variationen sind:
- einfaches Wägen und Protokollieren,
- Füllen von Behältern bis zu einem bestimmten Gewicht,
- Aussortieren von zu leichten und/oder zu schweren Gegenständen.
Die Gegenstände laufen dabei - wie oben schon erwähnt - in nicht unerheblicher Geschwindigkeit permanent über die Förderbänder.
Dafür wurde von der Firma Imatic GmbH ein System entwickelt, das mit Produkten der Firma Bizerba (zum Beispiel dem Industrie-Wägeterminal iS50) zusammenarbeiten kann. Es wird von der Firma Fries Maschinenbau gefertigt. Dafür müssen nun allerdings auch die Mitarbeiter geschult werden.
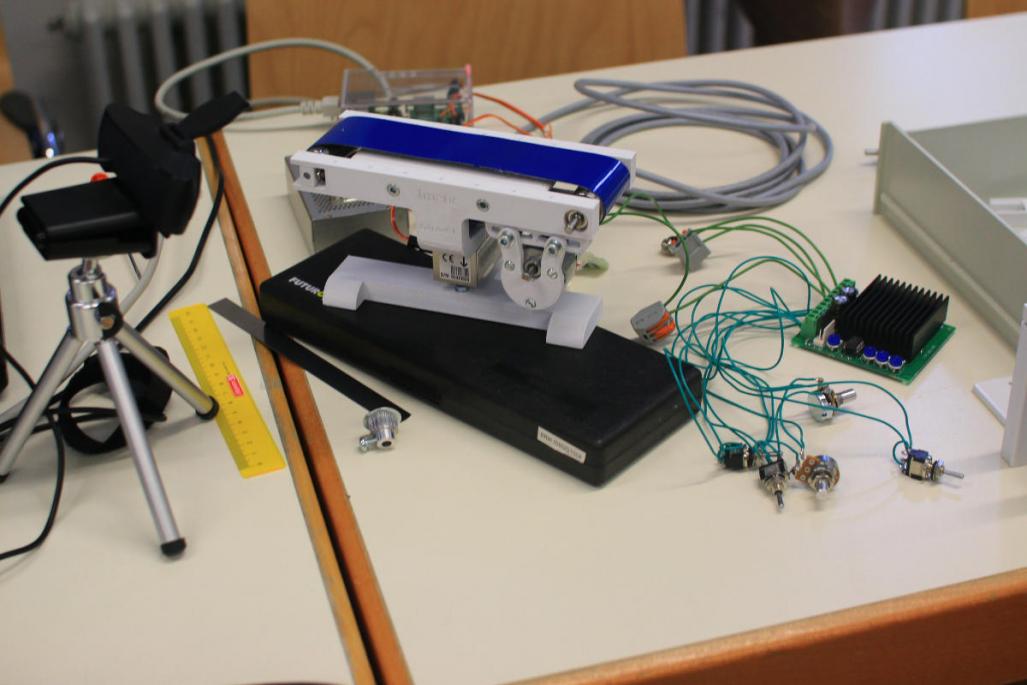
Dazu wurde ein Förderband-System im kleinen Maßstab konstruiert - die dazu notwendigen Teile werden z.B. von der Firma Fries auf 3D-Druckern ausgedruckt.
 Mehrere dieser Förderbänder - und die entsprechende Software, die auch echte Prozesse modelliert - werden schließlich zu einem Schulungskoffer zusammengestellt, von dem einige Exemplate erstellt werden müssen.
Mehrere dieser Förderbänder - und die entsprechende Software, die auch echte Prozesse modelliert - werden schließlich zu einem Schulungskoffer zusammengestellt, von dem einige Exemplate erstellt werden müssen.
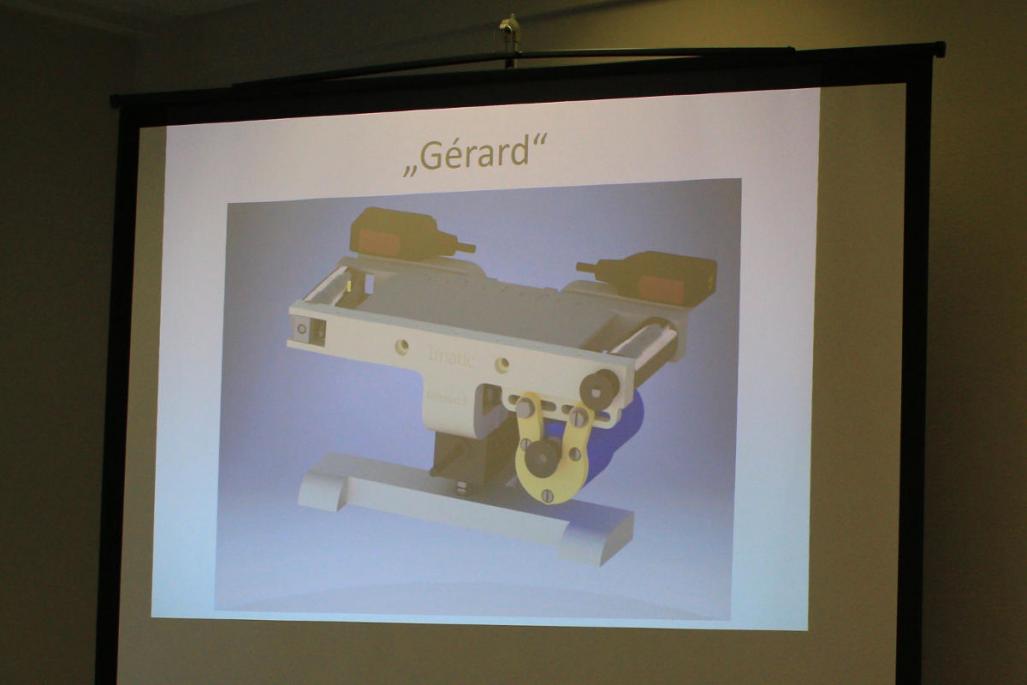
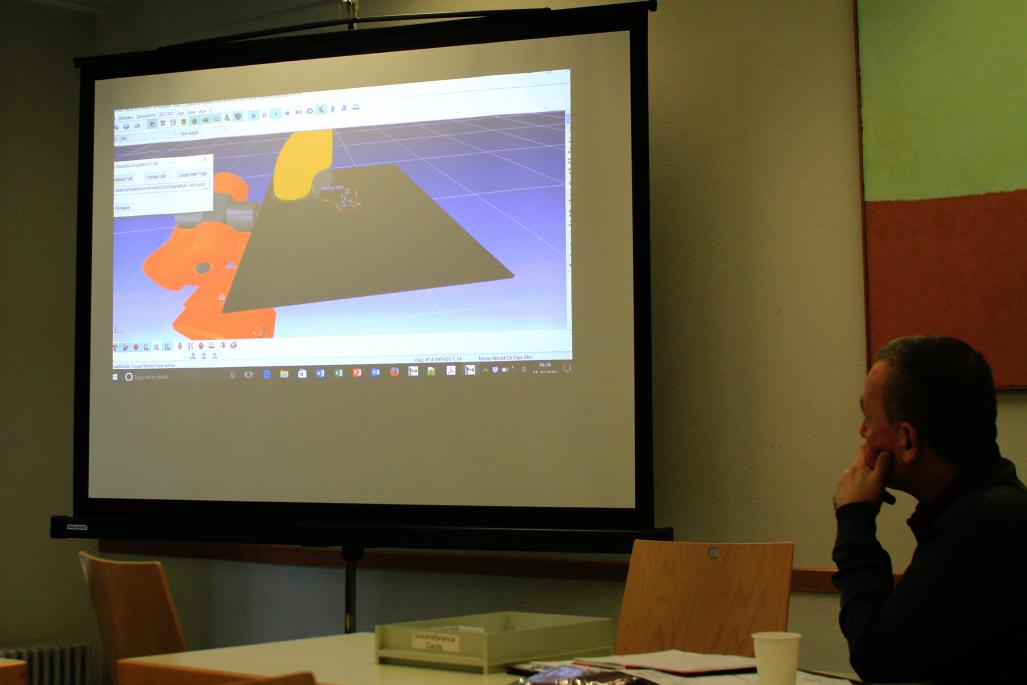
Das Bild rechts zeigt die 3D-Konstruktion eines solchen Systems (, an dem noch weitere Komponeneten beteiligt sind). Dieses Modell ist dann die Grundlage für den 3D-Druck der eigentlichen Kunststoff-Modelle, von denen eines im Bild oben zu sehen ist.
Natürlich besteht es nicht nur aus Kunststoff - auch präzise gefertige Rollen mit Kugellagern gehören dazu. Auch diese werden in der gleichen Firma gefertigt.
 Der nächste Aspekt befasst sich mit der Anwendung einer Technik, welche die RasPis auch können: Steuerung durch PWM - "Pulsweitenmodulation". Die Stärke eines Signals wird hier also nicht durch die Amplitude, sondern durch die "Länge" einzelner Impulse bestimmt.
Der nächste Aspekt befasst sich mit der Anwendung einer Technik, welche die RasPis auch können: Steuerung durch PWM - "Pulsweitenmodulation". Die Stärke eines Signals wird hier also nicht durch die Amplitude, sondern durch die "Länge" einzelner Impulse bestimmt.
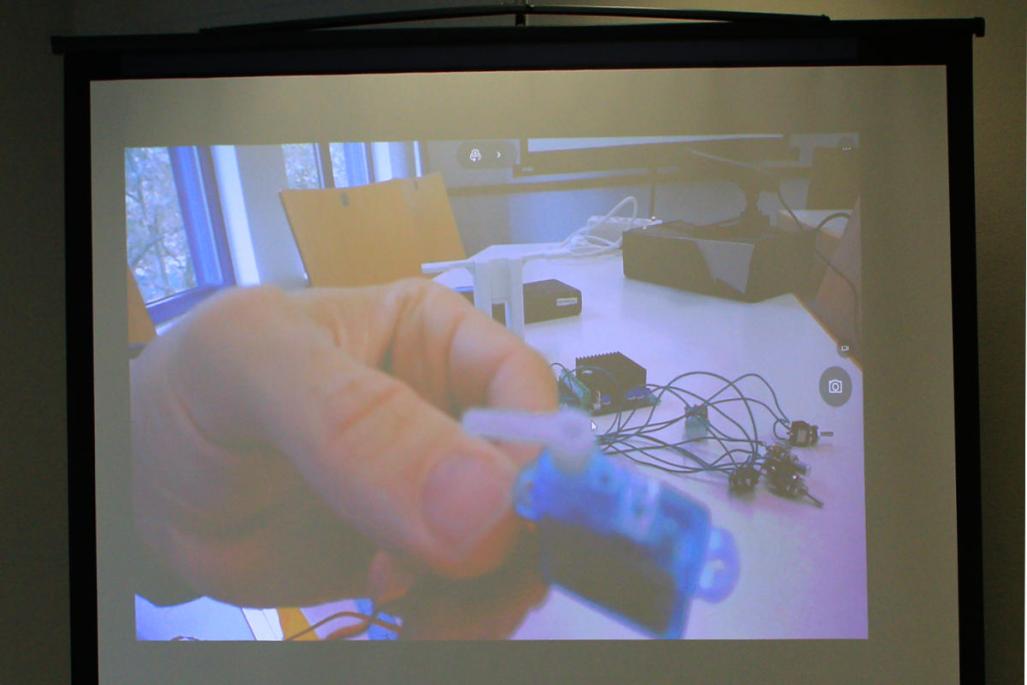
Bei obigem Wäge-Problem kann man hiermit die Elemente realisieren, welche z.B. zu leichte oder zu schwere Werkstücke vom Förderband entfenen - etwa in einer Seitwärtsbewegung vom Band "schubsen".
Die dazu verwendeten Servomotoren wie im BIld links sind Standard-Elektronik-Elemente und müsen nicht einzeln gefertigt werden. Angesteuert werden sie aber dann eben über den RasPi
 Prof. Dr. Thomas Horsch von der Hochschule Darmstadt, Fachbereich Informatik / Robotik, übernahm den letzten Vortrag. Dieser ging über den RasPI-Bereich hinaus, setzte aber bei dem schon vorher erwähnten 3D-Druck an.
Prof. Dr. Thomas Horsch von der Hochschule Darmstadt, Fachbereich Informatik / Robotik, übernahm den letzten Vortrag. Dieser ging über den RasPI-Bereich hinaus, setzte aber bei dem schon vorher erwähnten 3D-Druck an.
Bachelor-Absolventen betreiben bei ihm ein Projekt, das beim 3D-Druck eine andere Vorgehensweise als bisher verfolgt. Es wird nicht - wie sonst üblich - das Werkzeug, also der Extruder, bewegt, sondern das Werkstück selbst unter dem feststehenden Extruder. Durch Roboterarme mit bis zu sechs Freiheitsgraden möchte man erreichen, dass Stützmaterial beim Druck eines Werkstücks im Prinzip gar nicht mehr benötigt wird.
Ein normaler 3D-Drucker kann z.B. keinen "Balkon" an eine Hauswand drucken, da unter diesem ja "nichts" ist - hierzu benötigt man dann eben Stützmaterial, das später entfernt wird.
 Wird aber das Werkstück - zum Beispiel beim Druck eben dieses Balkons - etwa so bewegt, dass sich die Hauswand beim Druck "unter" ihm befindet, kann das Stützmaterial entfallen.
Wird aber das Werkstück - zum Beispiel beim Druck eben dieses Balkons - etwa so bewegt, dass sich die Hauswand beim Druck "unter" ihm befindet, kann das Stützmaterial entfallen.
Theoretische Untersuchungen belegen durchaus die Vorteile dieser Methode - eine praktische Umsetzung gibt es noch nicht.
Wie eine solche aber aussehen könnte, zeigte uns Prof. Dr. Horsch anhand einer 3D-Simulation des Drucks eines Rohres in Form eines Viertelkreises.
Ein sehr informativer Nachmittag! Herzlichen Dank an alle Beteiligten
P.Poloczek, Leiter der RG600 und Schriftführer im AUGE e.V.